
Sensors, Free Full-Text
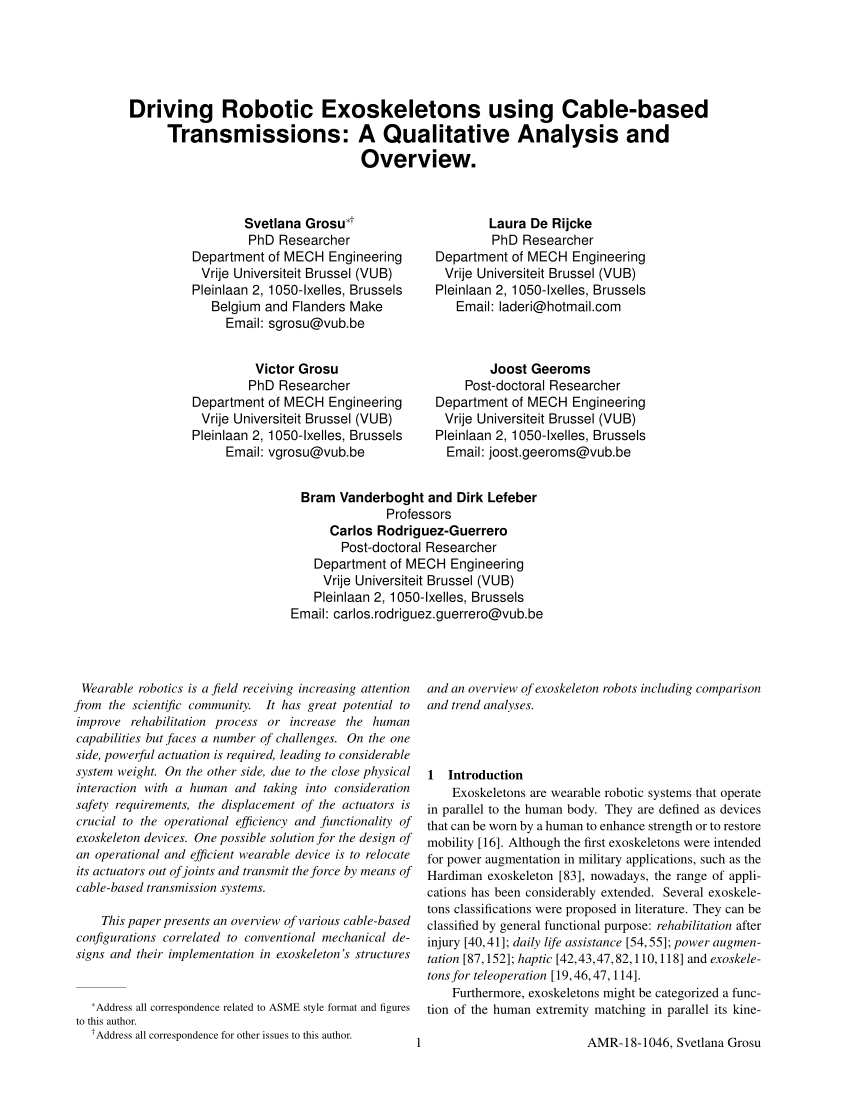
PDF) Driving Robotic Exoskeletons Using Cable-Based Transmissions: A Qualitative Analysis and Overview
C-ALEX worn in Active/Transparent mode (left) and in Passive mode (right)

PDF) Driving Robotic Exoskeletons Using Cable-Based Transmissions: A Qualitative Analysis and Overview

Cable-driven systems for robotic rehabilitation - ScienceDirect

Victor GROSU, Doctor of Engineering, Vrije Universiteit Brussel, Brussels, VUB, Applied Mechanics (MECH)

Comparing optimized exoskeleton assistance of the hip, knee, and ankle in single and multi-joint configurations

PDF) Driving Robotic Exoskeletons Using Cable-Based Transmissions: A Qualitative Analysis and Overview
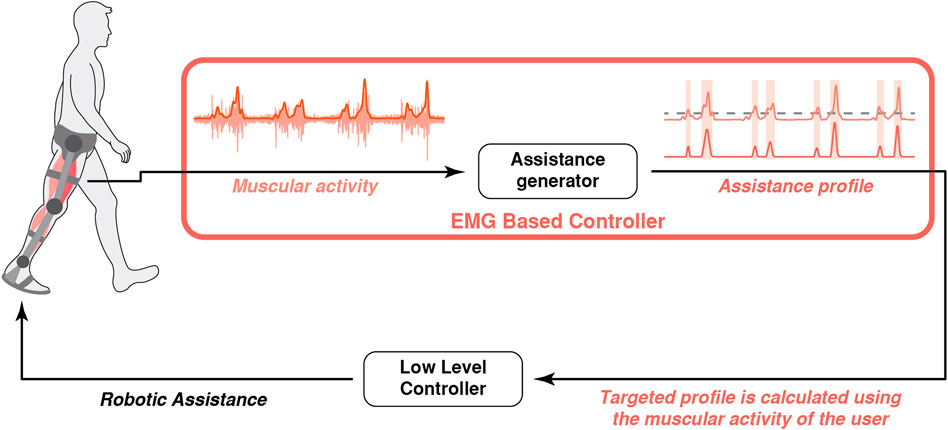
Frontiers Coordination Between Partial Robotic Exoskeletons and Human Gait: A Comprehensive Review on Control Strategies

RiceWrist-S, a 3 DOF forearm-wrist grounded exoskeleton. Based on
Joost GEEROMS, PostDoc Position, PhD, Vrije Universiteit Brussel, Brussels, VUB, Department of Mechanical Engineering (MECH)

C-ALEX, a cable-driven unilateral leg exoskeleton designed for gait







