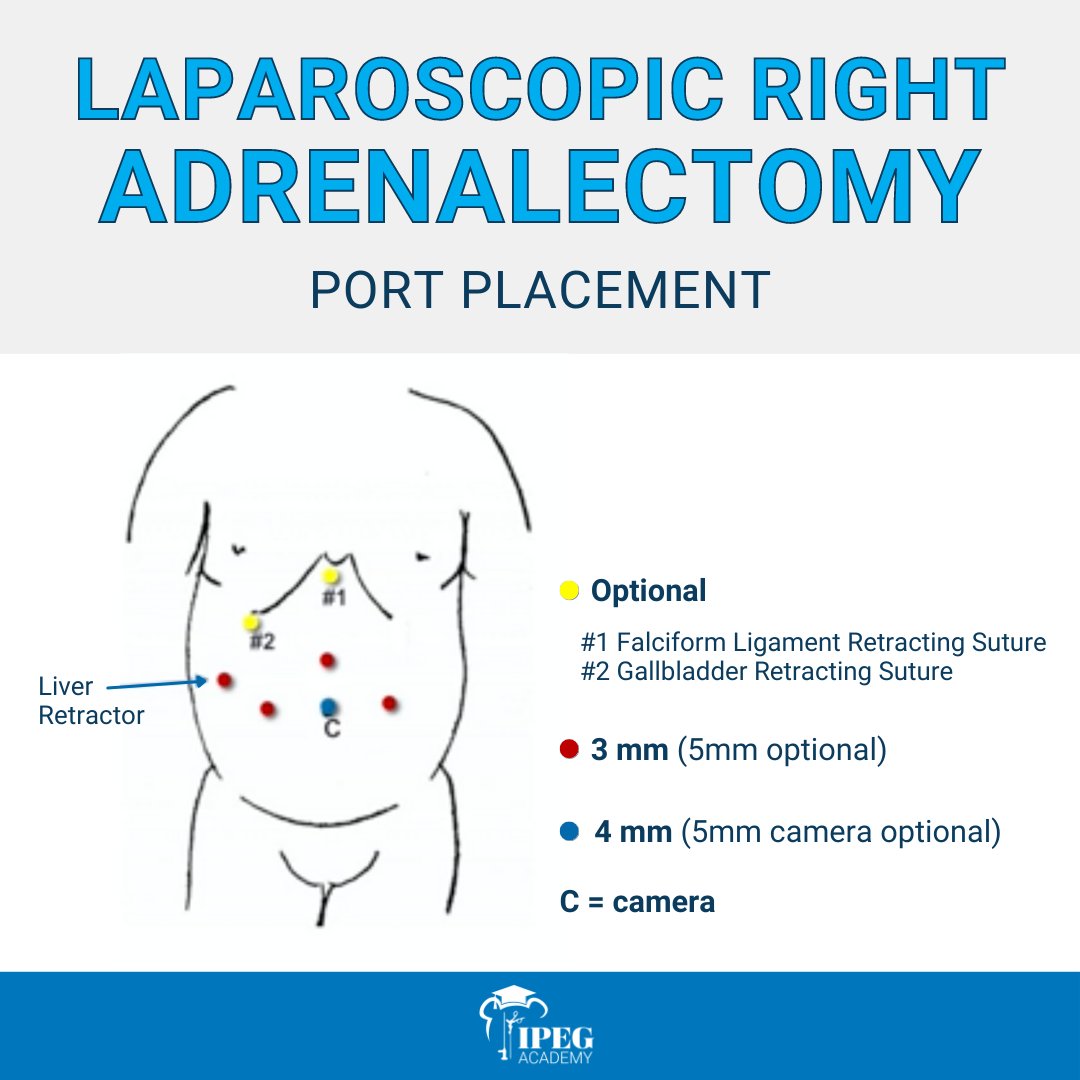
Port placement. R1–4 indicate the robotic ports, whereas A1–2 indicate


Linear universal port placements along (MCL) for da Vinci Xi for

Challenge in optimizing robotic pancreaticoduodenectomy including nerve plexus hanging maneuver: a Japanese single center experience of 76 cases

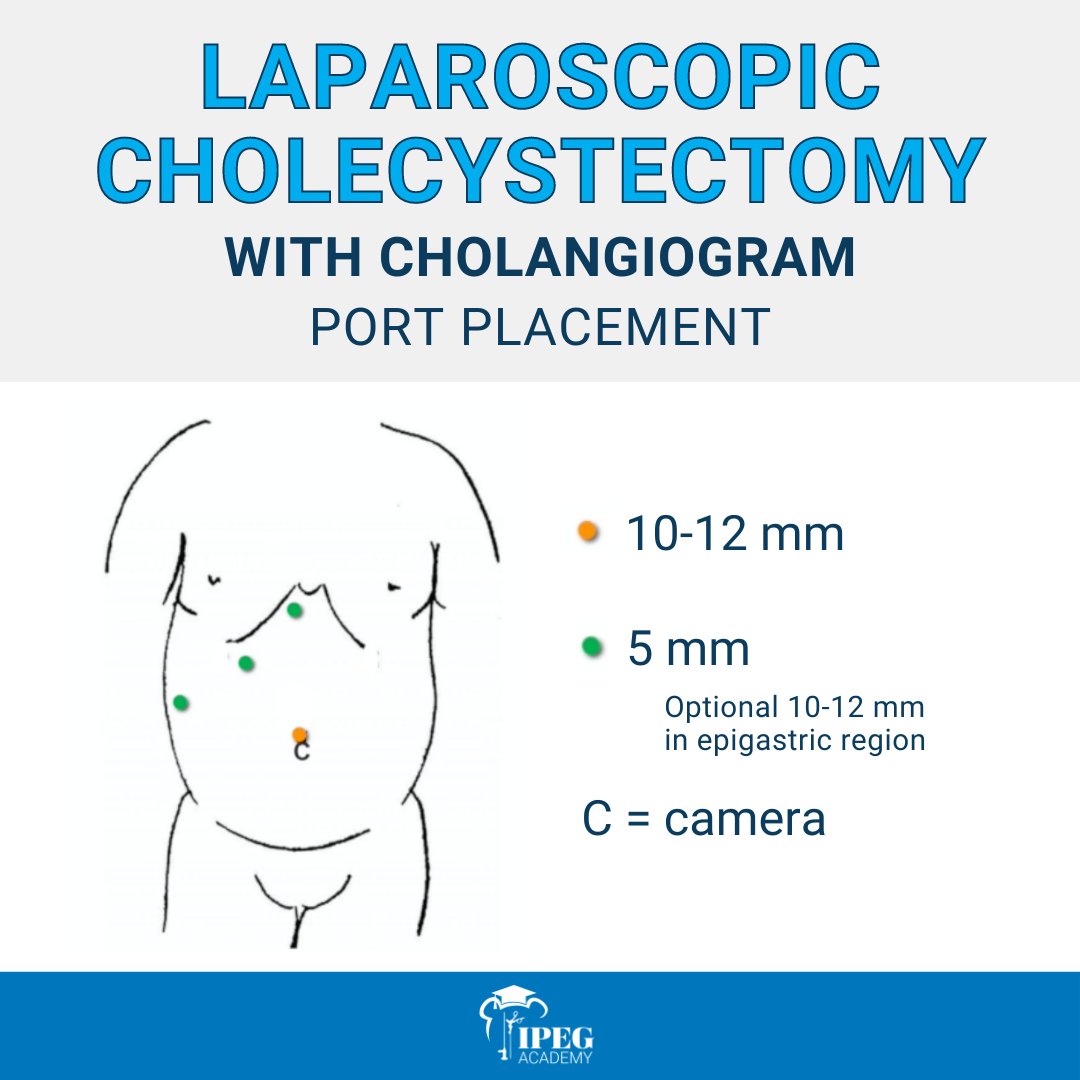
Flow diagram for elective laparoscopic cholecystectomy including

Robot-assisted pancreatic surgery—optimized operating procedures

Frontiers Total Intracorporeal Robot Kidney Autotransplantation

Challenge in optimizing robotic pancreaticoduodenectomy including nerve plexus hanging maneuver: a Japanese single center experience of 76 cases

Robotic Abdominoperineal Resection: Cylindrical and Selective

Robotic open-thoracotomy-view approach using vertical port

Frontiers Retroperitoneal robot-assisted live-donor nephrectomy

Using Arduino Interrupts - Hardware, Pin Change and Timer

Regression analysis of operating time and postoperative Hb drop: a TR

Arduino Uno R4 - Minima & WiFi - Getting Started

Patient Positioning, Port Placement, and Docking: Si, Xi, and SP

Robot-assisted pancreatic surgery—optimized operating procedures

Port placement. R1–4 indicate the robotic ports, whereas A1–2