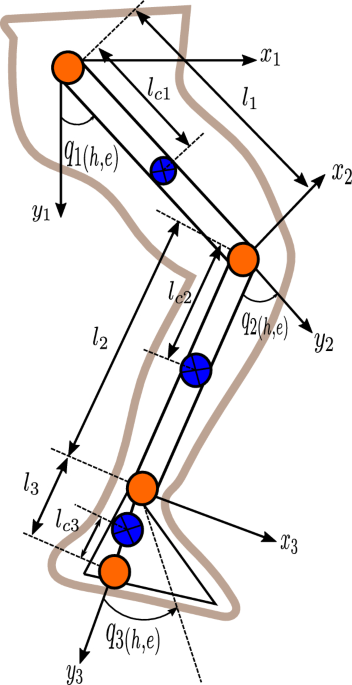
The two-segment leg has a torque-controlled actuator at the hip, and a

Description

Figure 2 from Dynamic Locomotion Gaits of a Compliantly Actuated
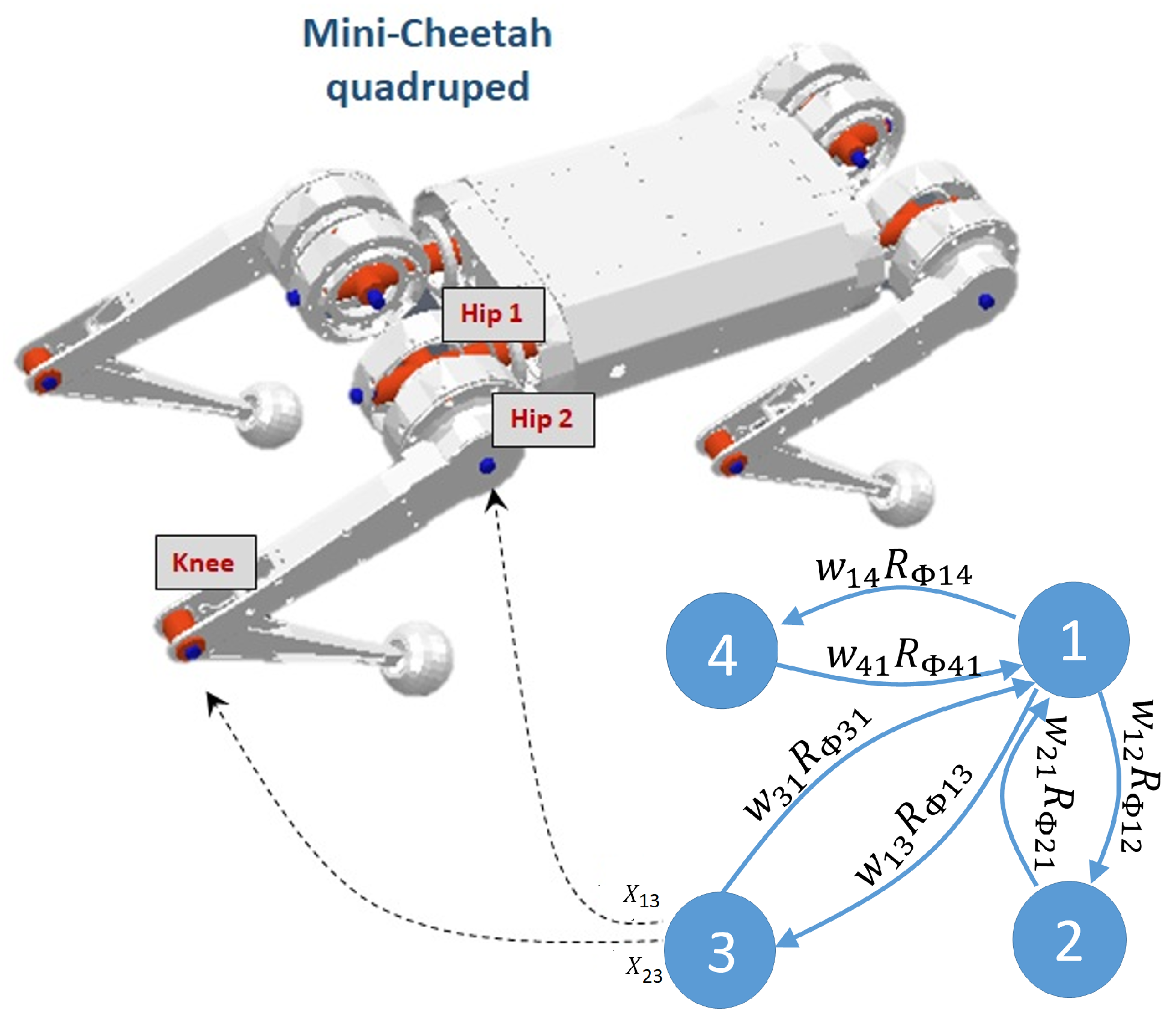
Robotics, Free Full-Text

Steve Heim's research works Massachusetts Institute of Technology, MA (MIT) and other places
Biomimetics, Free Full-Text

Robots' physical environment

Table 2 from Towards dynamic trot gait locomotion: Design, control

The two-segment leg has a torque-controlled actuator at the hip
Adaptive RBF neural network-computed torque control for a

Line graphs show: (a) Hip sagittal torque from previous research

PDF] High compliant series elastic actuation for the robotic leg
Related products

Just the difference between a corset with correct hip and rib springs, and the same waist size wrong spring corset .. (Bought the wrong spring corset back in the days when I
Managing Hip and Knee Osteoarthritis Education Sessions: Registration Page – GLA:D Canada

Booty Builder Olympic Hip Thrust Barbell With Spring Collars, Suitable For Home Gym Fitness Weightlifting, Power Lifting, Strength Training and Crossfit - 5 Foot Length, 500 LB Capacity : Sports & Outdoors

Hip Dysplasia Baby Bean Bag and High Cut Onesies Package




$ 26.50USD
Score 4.9(312)
In stock
Continue to book
$ 26.50USD
Score 4.9(312)
In stock
Continue to book
©2018-2024, followfire.info, Inc. or its affiliates