Frontiers Gait Optimization Method for Humanoid Robots Based on

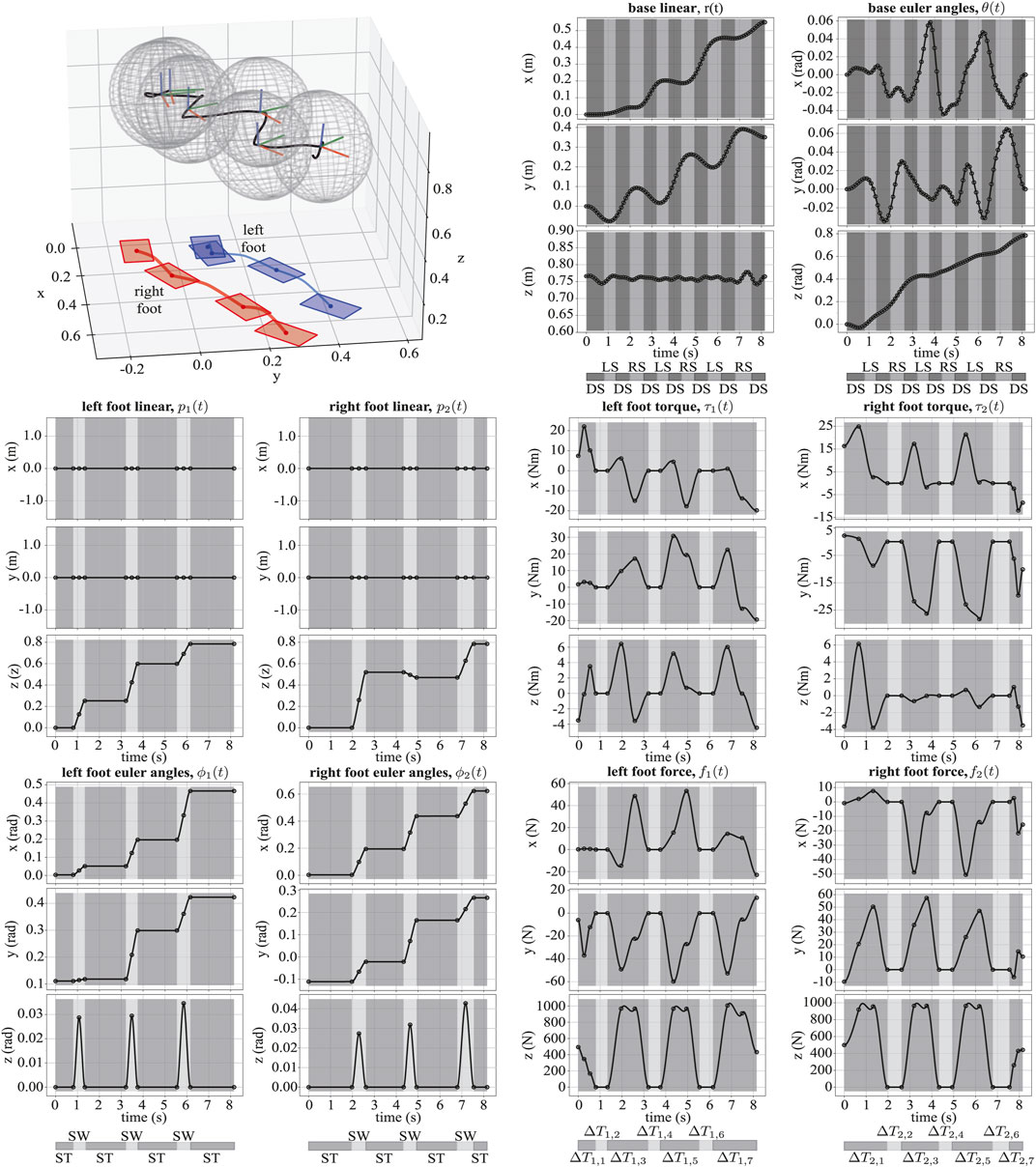
Frontiers Versatile Locomotion Planning and Control for Humanoid
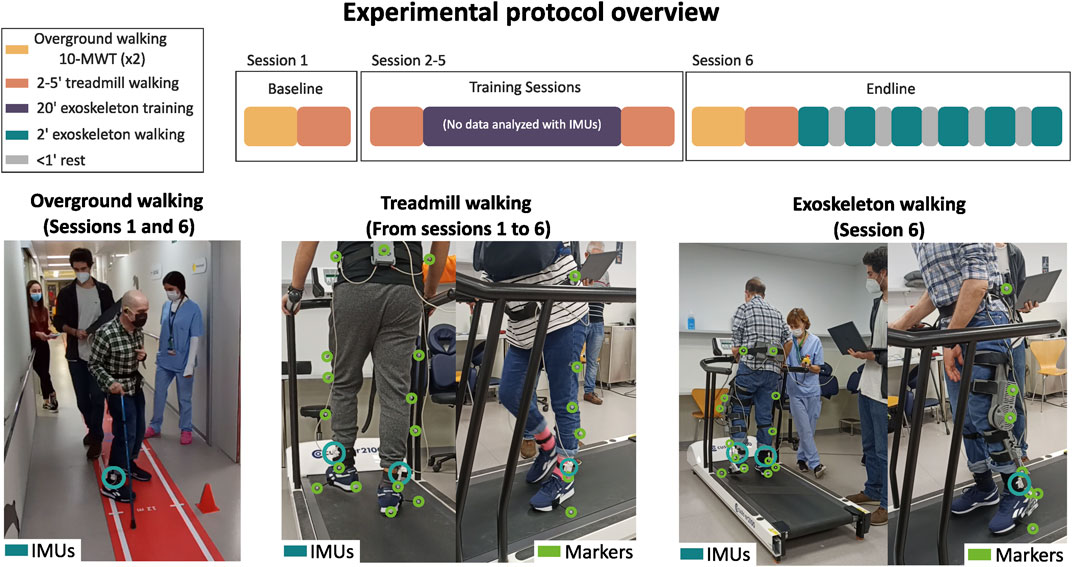
Frontiers Inertial sensors for gait monitoring and design of
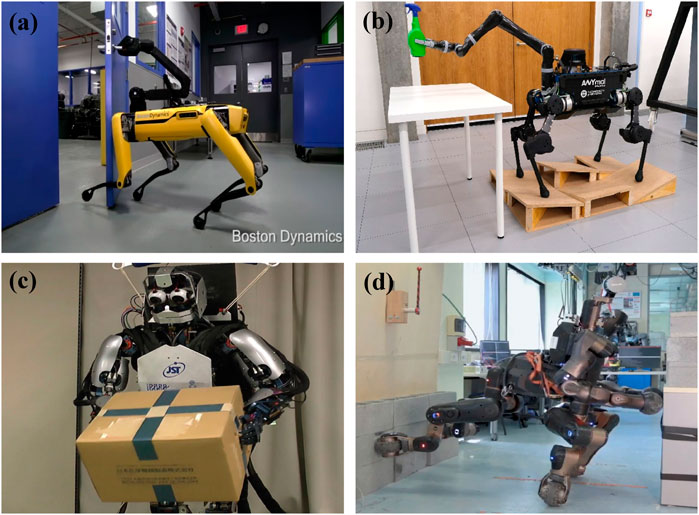
Frontiers Legged robots for object manipulation: A review

Smart Gait: A Gait Optimization Framework for Hexapod Robots
Frontiers Versatile Locomotion Planning and Control for Humanoid
Frontiers Gait Optimization Method for Humanoid Robots Based on
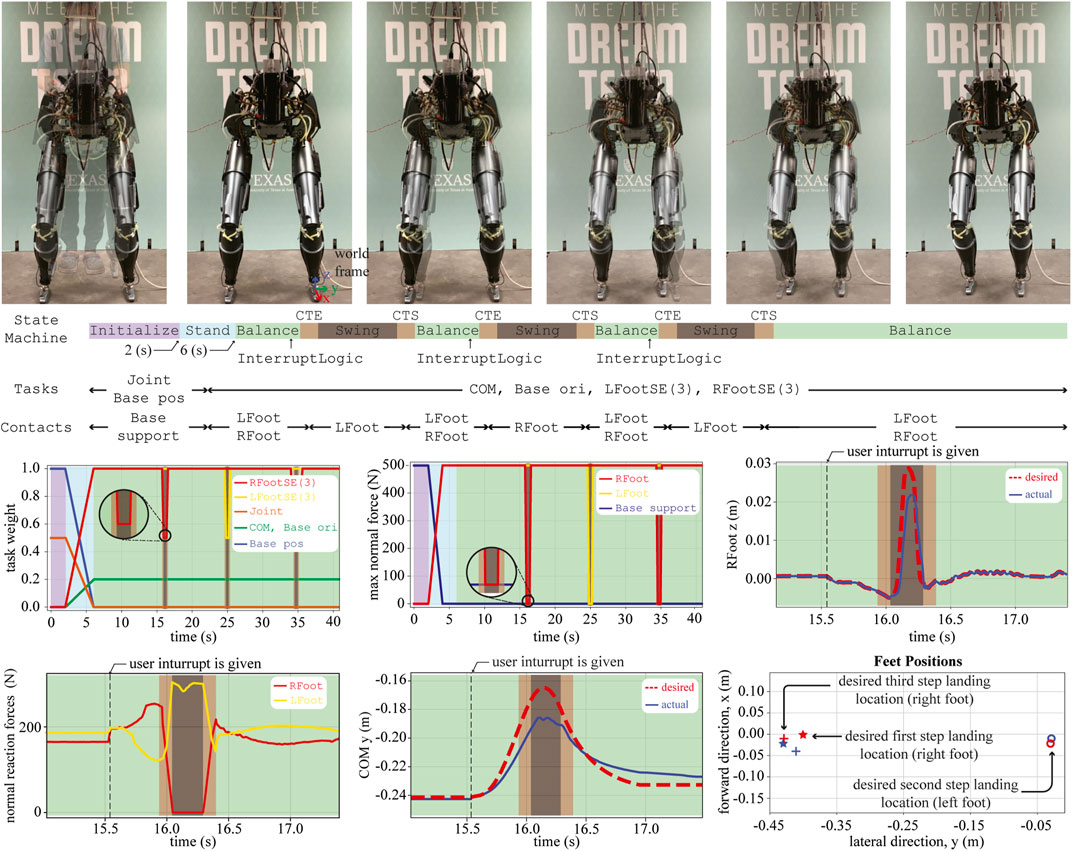
Frontiers A Holistic Approach to Human-Supervised Humanoid Robot
Frontiers Closed-Loop Torque and Kinematic Control of a Hybrid
A review on gait generation of the biped robot on various terrains
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Biped Robots With Compliant Joints for Walking and
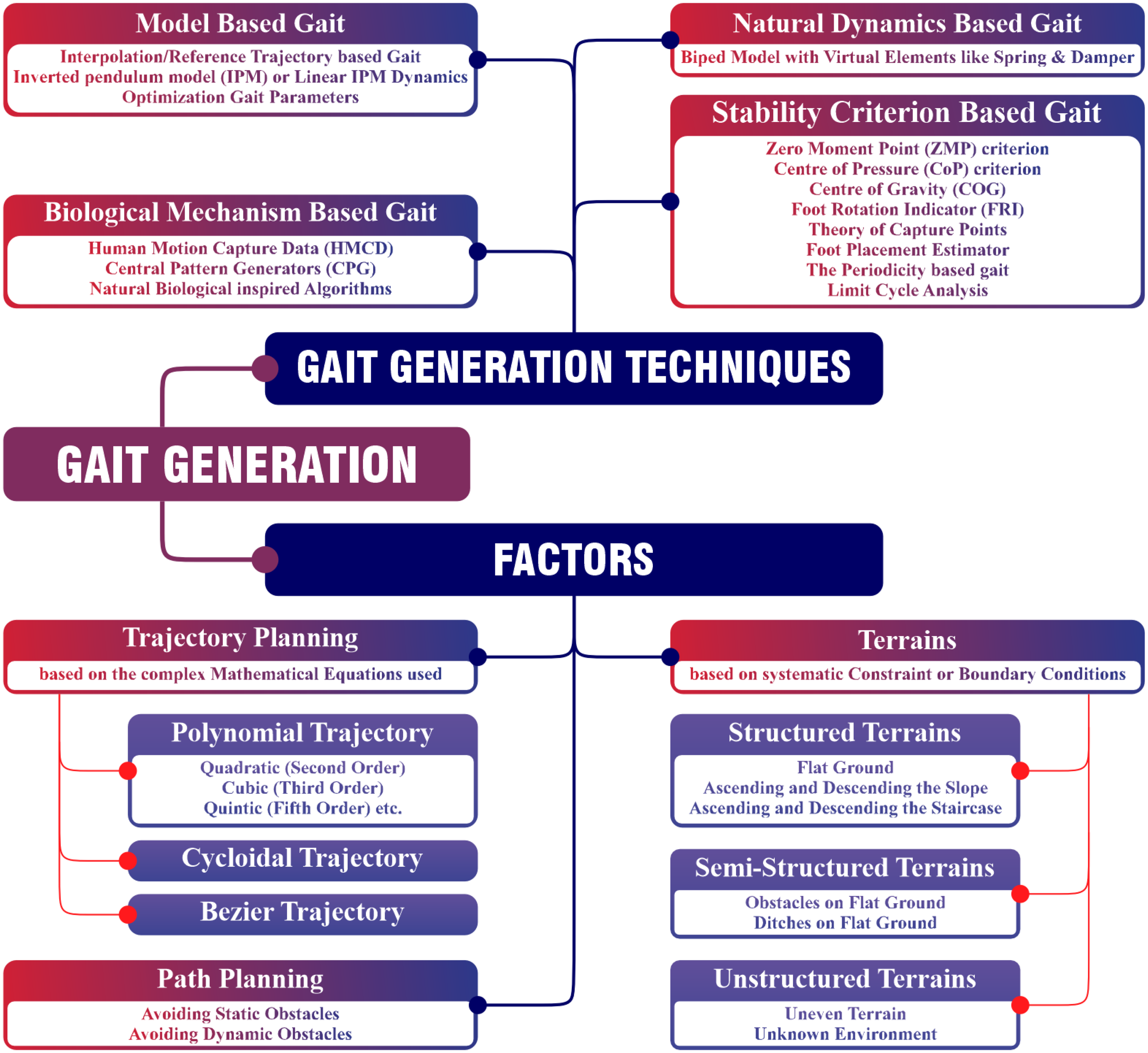
A review on gait generation of the biped robot on various terrains

Advancements in Humanoid Robots: A Comprehensive Review and Future
:quality(85):upscale()/2024/02/22/945/n/1922729/1780ab7965d7bfa9cce0a2.81891219_.jpg)



